
△테러는 내가 책임진다. 지능형 감시경계로봇
세계적으로 테러에 대한 경각심이 높은 가운데 순수국내기술로 개발된 지능형 감시경계로봇(이하 감시로봇)이 지난해 10월 공개돼 많은 주목을 받았다. 감시로봇은 움직이는 물체를 탐지해 침입자로 확인되면 몸체에 장착된 K-3 기관총 등을 이용해 제압이 가능하다.
현재 시판 중인 감시장비와 달리 추적, 제압기능이 포함돼 가치가 더욱 높다. 추적과 제압은 뛰어난 형상·음성인식기능 덕분에 가능하다. 이 기능에 이용된 소프트웨어는 본교의 지능신호처리연구실(고한석 교수·공과대 전기전자전파공학부)의 순수기술로 제작된 것이다.
형상인식기술
물체를 하나의 점으로 인식하는 기존의 감시장비와 달리 감시로봇은 스켈렉톤(skelecton)기술을 사용해 물체가 사람인지 차량인지를 구별할 수 있다. 스켈렉톤기술은 물체의 윤곽을 그대로 인식하는 대신 로봇 스스로 물체의 핵심부분을 지정하는 것이다. 핵심부분을 점으로 연결해 일종의 골격을 형성한 뒤, 움직임을 파악한다.
예를 들어 자동차의 지붕, 앞유리, 범퍼, 바퀴, 트렁크를 핵심부분으로 지정하고 그 점들을 이어 골격을 형성했다고 하자. 자동차가 움직이면 바퀴 4개는 일정하게 돌아가며 나머지는 동시에 같이 움직일 것이다. 사람은 머리와 가슴의 점은 동시에 움직이고, 팔다리는 개별적으로 움직인다. 로봇은 이 차이점을 카메라로 인식해 물체를 구별하는 것이다.
보통 로봇의 카메라는 사람의 눈과 비슷하다. 사람이 빛의 밝기가 크게 변할 때 영상을 잘 인식하지 못하는 것처럼 카메라도 역광일 때 어두운 부분을 선명하게 인식하지 못한다. 하지만 감시로봇의 카메라도 역광 속의 적을 인식하지 못한다면 효용성이 크게 감소할 것이다. 이러한 문제를 해결하기위해 감시로봇엔 어두운 영역과 밝은 영역의 정보를 균형적으로 처리하는 K-Reitnex 알고리즘이 적용됐다.
음성인식기술
사람의 귀는 원하는 소리에만 집중하는 것이 가능하지만 로봇은 잡음 속에서 특정 소리만 잡아내는 것이 쉽지 않다. 이를 보완하고자 감시로봇의 목 부위에 동일간격으로 마이크와 음성인식장치 4개를 장착했다. 이 장치는 동그란 파이프 모양으로 정면으로 들어오는 소리만 인식해 잡음을 최소화한다.
고한석 교수는 “형상·음성인식 소프트웨어의 개발은 그 응용분야가 무궁무진하다”며 “모든 연구결과는 우리 연구실만의 순수기술로 많은 기업에서 문의를 한다”고 밝혔다. 현재 지능신호처리연구실에서는 입술의 움직임을 인식해 차 안에서도 메일과 문서를 작성할 수 있는 기술을 개발 중이다.
또한 뉴스를 실시간으로 자막화하고, 키워드로 요약해 문서화하는 기술을 KBS와 공동연구 중이다. 고 교수는 “감시경계형 로봇은 우리 기술의 십분의 일도 안된다”며 “연구가 혁신적이고 신기해 우리 연구실을 다들 ‘지능방’으로 부른다”고 말했다.
한국건설업계는 전문인력의 부족과 고령화, 3D업종 기피로 어려움을 겪고 있다. 전문가들은 2010년이 되면 국내에 약 42만 명의 전문인력이 부족할 것이라 예상하고 있다. 일본은 지난 1990년대 초부터 이 문제를 해결하고자 대기업을 중심으로 건설자동화로봇 연구를 진행해왔다. 우리나라는 최근에서야 정부의 지휘 하에 다양한 사업을 추진하고 있다.
이 사업의 일환으로 본교는 지난 2월 고층건물시공자동화연구단(단장=박귀태 교수·공과대 전기전자전파공학부, 이하 연구단)을 발족하고 본격적인 건설자동화로봇 연구에 착수했다. 연구단은 본교를 중심으로 총 13개 기관, 190여명의 연구원으로 구성됐다. 연구에는 지난해부터 2011년까지 총 226억의 연구개발비가 지원된다.
코어선행공법
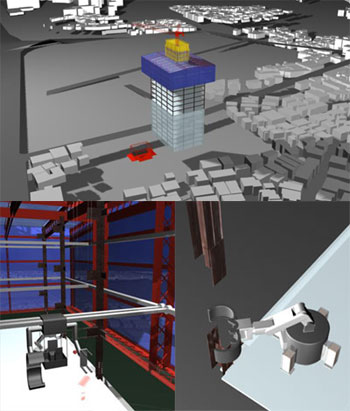
연구단은 일본의 적층공법과 다른 한국형의 코어(core)선행공법에 기초해 연구를 진행 중이다. 일본의 경우, 지진이 잦아 건물을 한 층씩 완공해 나간다. 이를 위해 1200여톤에 이르는 건설구조체, CF(construction factory)를 유압기계로 들어 올려야 한다. CF는 건설에 필요한 여러 자동화 로봇들이 하나로 모여 있는 구조체로 ‘건설공장’이라고도 불린다. 결국 건설자동화로봇을 개발하는 것은 CF를 개발하는 것이다. 하지만 우리나라는 지진이 거의 없어 코어라고 불리는 일종의 크레인에 자동화 로봇을 설치하는 공법이 훨씬 경제적이다. 유압기계가 필요 없고 핵심공정만을 자동화할 수 있기 때문이다.
경량CF개발
개발의 핵심은 코어선행공법에 적합한 400여톤의 경량 CF를 개발하는 것이다. 이를 위해 전파식별(RFID.radio frequency identification)을 적용한 타워크레인과 레일주행이 가능한 소형 로봇, 반자동화를 위한 원격조정로봇을 개발 중이다. 타워크레인이 건설자재를 들면 자재의 무게는 타워크레인이 지지하므로 CF 내에 대형크레인을 설치할 필요가 없다. 따라서 CF의 무게가 크게 줄어든다. 또한 대형 크레인이 담당하던 자재 설치는 레일을 깔고 CF 내에서 자유롭게 작업이 가능한 소형로봇을 설치해 보완한다.
박귀태 연구단장은 “최근 건설현장에서 허드렛일은 외국노동자나 고령의 근로자가 담당해 건설업무의 로봇자동화는 절실하다”며 “로봇자동화는 작업량과 시공기간을 30%정도 줄일 수 있고 한국 건설 산업의 경쟁력을 크게 향상시킬 것”이라고 건설자동화에 기대를 표했다.